Latest Labs
Lab 12 - Path Planning
The objective of Lab 12 is to have the robot navigate through a set of waypoints in map.

Lab 11 - Localization (Real)
The objective of Lab 11 is to implement the update step of the Bayes Filter on the actual robot.
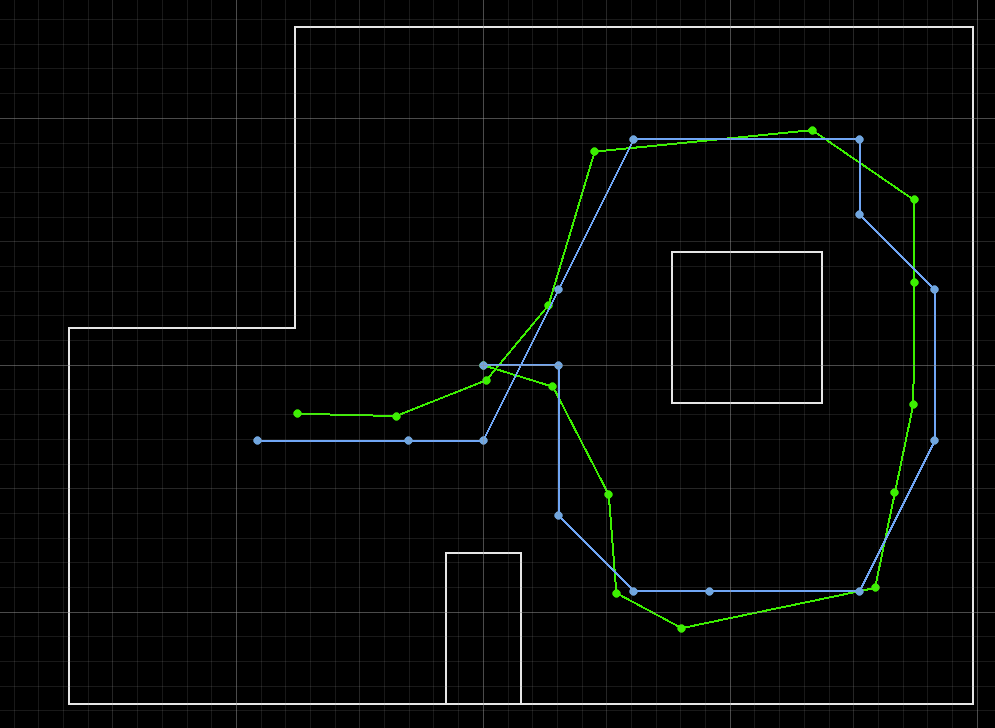
Lab 10 - Localization (Simulation)
The objective of Lab 10 is to implement the Bayes Filter into the simulator to perform grid localization.
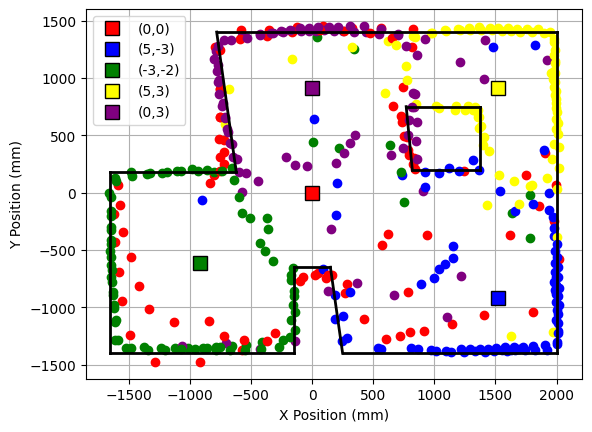
Lab 9 - Mapping
The objective of Lab 9 is to map a static room with the robot.
All Labs

Lab 1 - Artemis
The objective of Lab 1 is to set up the Artemis board, test different programs, and become familiar with the bluetooth connection and commands.

Lab 2 - IMU
The objective of Lab 2 is to learn how to use the IMU; sampling data from the Accelerometer and from the Gyroscope.
Lab 3 - ToF
The objective of Lab 3 is to learn how to use the Time of Flight sensor; and being able to use two of them in parallel.
Lab 4 - Motors
The objective of Lab 4 is to learn how to use the motors on the robot, with one driver for each motor.
Lab 5 - Position Control
The objective of Lab 5 is to develop a PID controller so that the robot runs towards a wall and stops at 1ft.
Lab 6 - Orientation Control
The objective of Lab 6 is to develop a PID controller so that the robot mantains a certain angle, defined as a SetPoint.
Lab 7 - Kalman Filter
The objective of Lab 7 is to develop a Kalman Filter for our robot, and simulate in Python.

Lab 8 - Stunts
The objective of Lab 8 is to perform a Stunt with the robot.
Lab 9 - Mapping
The objective of Lab 9 is to map a static room with the robot.
Lab 10 - Localization (Simulation)
The objective of Lab 10 is to implement the Bayes Filter into the simulator to perform grid localization.
Lab 11 - Localization (Real)
The objective of Lab 11 is to implement the update step of the Bayes Filter on the actual robot.